Operating Systems Final Notes
Summary
The following notes are a summarization of my key notes from my operating systems course, taught by Dr. Golden Richard at LSU, in addition to my external research.
The preferred language... is C, because you are exposed to memory management, pointers, and have direct access to threads, system calls, and its efficiency as a language (higher than assembly) while still being accessible.
Synchronization
With multiple processes/threads sharing resources, there needs to be a way to maintain consistency for concurrent access. This is achieved through synchronization primitives, ensuring mutual exclusion before accessing the critical section, and then releasing it.
The correct enforcement of mutual exclusion ensures:
- Safety: Only one process/thread accesses the critical section at a time.
- Liveness/Progress: If no process is executing the critical section and others want to enter, they will eventually gain access.
- Bounded Waiting/No Starvation: The waiting time before access is granted is finite.
- Each process executes at a non-zero speed.
- There are no assumptions about relative execution time.
- The solution does not contain race conditions.
[Dekker's Algorithm]
bool flag[2]; int turn;
int main() { flag[0] = flag[1] = false; parbegin(P0, P1); } // init code
void P0()
{ // P0 //
while(true)
{ // w //
flag[0] = true; // set flag for process to want to go
while(flag[1]) // if other process wants to go...
{ // w //
if(turn == 1) // ...and it is the other process's turn
{ // i //
flag[0] = false; // temporarily disable your want to go
while(turn == 1); // wait until other loses / uses turn
flag[0] = true; // re-enable your want to go
} // i //
} // w //
// critical section // // now mark your critical section
turn = 1; // set the the other turn so the other process can go...
flag[0] = false; // ...and disable your want to go
// non-critical code // // and do non-critical stuff
} // w //
} // P0 //
void P1()
{ // P1 //
while(true)
{ // w //
flag[1] = true; // say I want to go
while(flag[0]) // if the other process also wants to go
{ // w //
if(turn == 0) // if it is the other process's turn...
{ // i //
flag[1] = false;
while(turn == 0);
flag[1] = true;
} // i //
} // w //
// critical section //
turn = 0;
flag[1] = false;
// non-critical code //
} // w //
} // P1 //
[pf]
[Peterson's Algorithm]: Implementation details...
int flag[2]; int turn;
void main() { flag[0] = flag[1] = false; parbegin(P0, P1); }
void P0()
{
while(true)
{
flag[0] = true; // marking I want to go
turn = 1; // give the turn to the other guy
while(flag[1] && turn == 1); // wait / loop until other process loses / uses turn or no longer wants to go
// critical section //
flag[0] = false; // mark I am done wanting to go (don't want to go now)
// remainder of non-critical code...
}
}
void P1()
{
while(true)
{
flag[1] = true; // mark I want to go
turn = 0; // hand over turn to other guy
while(flag[0] && turn == 0); // wait / do nothing until they lose turn / desire
// now do the // critical section //
flag[1] = false; // mark I am done wanting to go
// remainder of non-critical code...
}
}
[Lamport's Bakery Algorithm]: Implementation details...
// shared vars / init
bool choosing[n] = {false}; // sets all processes taking a # ??? to false
int number[n]; // sets number i chooses to 0 for all of n is.
while(1) // each process i
{ // w //
choosing[i] = true; // start choose
number[i] = max(number) + 1; // choose 1 higher than the highest number
choosing[i] = false; // end choose
for(j = 0; j < n; j++)
{ // f //
while(choosing[j]); // wait until process j is done choosing
while(number[j] != 0 && ( (number[j], j) < (number[i], i) ));
} // f //
// critical section //
number[i] = 0; // set number super low (resets it) so other processes can go
// remainder of non-critical code...
} // w //
While the Bakery alg. works, but you don't want to manually have to implement it every time--in software. Ideally, you want hardware support. One such method is...
[Test & Set]
// T&S DEF //
#define LOCKED 1
int TestAndSet(int* lockPtr)
{
// start atomic segment of code
int oldValue = *lockPtr;
*lockPtr = LOCKED;
// end of atomic segment of code
return oldValue;
}
void Critical()
{
while(TestAndSet(&lock)); // wait until lock is 0 (unlocked)
// critical section // ... only 1 process can be here at a time
lock = 0; // unlock
// remainder of non-critical code...
}
// T&S DEF //
// BOUNDED WAITING T&S EX //
// shared vars / init
int lock = 0; int waiting[n] = {0};
// local vars
int key, j;
while(1) // each process i
{
waiting[i] = 1; /* global */ key = 1; /* local */
while(waiting[i] && key) { key = TestAndSet(lock); } // wait until lock is 0 (unlocked)
waiting[i] = 0; // done waiting
// critical section //
j = (i + 1) % n; // next process (potentially, if...)
while(j != i && !waiting[j]); // wait until next process is done or not waiting
if(j == i) { lock = 0; } // if you are the next process, reset the lock
else { waiting[j] = 0; } // otherwise, the next process is no longer waiting
// remainder of non-critical code...
}
// BOUNDED WAITING T&S EX //
Those are some great examples of software and hardware methods to ensure atomic synchronization, but here are two higher-level ways to use this atomicity:
Monitors: set of protected data items and set of mutually-exclusive procedures (only 1 thread / process / procedure running at a time) to access data items.
monitor monitor_name
{
// shared variable declarations
function P1() { ... } // procedure 1
function P2() { ... } // procedure 2
...
function Pn() { ... } // procedure n
// condition variable declarations: suspend execution temporarily to allow other threads to enter the monitor
X.wait() { ... }
X.signal() { ... }
}
Semaphores: a high-level integer variable accessed by two atomically executed operations...
- wait(S): S--; if(S>0) block(); /* if available space, give it or I'll wait until one is available. */
- signal(S): S++; if(S<=0) wakeup a process; /* when done wake a process if any are waiting. */
class Semaphore
{
public:
void Wait(Process P);
void Signal();
private:
int value;
Queue Z; // queue of processes
}
Semaphore(int val) { value = val; Q = empty; }
Wait(Process P)
{
value--;
if(value < 0) { Q.add(P); P->block(C); }
}
Signal()
{
value++;
if(value <= 0) { P = Q.remove(); P->wakeup(); }
}
// mutual exclusion: used to guard critical sections
// scheduling constraings: used to express general scheduling constrains where must wait for some circumstance
[Bounded Buffer (Producer-Consumer) Problem (semaphore solution)] := producer and consumer processes share a fixed-length buffer
// shared vars / init
samaphore avail, empty, mutex;
item_type buffer[n];
avail = 0; // # items produced
empty = n; // # empty slots
mutex = 1; // guards the critical section
// PRODUCER PROCESS //
while(1)
{
// produce items in nextp
wait(&empty); wait(&mutex);
// add nextp to its buffer
signal(&mutex); signal(&avail);
}
// PRODUCER PROCESS //
// CONSUMER PROCESS //
while(1)
{
wait(&avail); wait(&mutex);
// remove an item from buffer - its nextc
signal(&mutex); signal(&empty);
// consume nextc at leisure
}
// CONSUMER PROCESS //
[Reader-Writer Problem] := several concurrent processes want to read / write shared data items / files
if reader present & writer waiting
- Reader preference: allow additional readers to enter
- Writer preference: ban additional readers until writer gets a chance
// STRONG-WRITER SOLUTION //
// shared vars / init
semaphore mutex = 1, write = 1; int readcount = 0;
void Write()
{
wait(&write);
// critical section (WRITING HERE) //
signal(&write);
}
void Read()
{
wait(&mutex);
readcount++;
if(readcount == 1) { wait(&write); }
signal(&mutex);
// critical section (READING HERE) //
wait(&mutex);
readcount--;
if(readcount == 0) { signal(&write); }
signal(&mutex);
}
// STRONG-WRITER SOLUTION //
// STRONG-READER SOLUTION //
// STRONG-READER SOLUTION //
// STRONG-STRONG-WRITER SOLUTION //
// STRONG-STRONG-WRITER SOLUTION //
[Dining Philosophers Problem] := 5 (n) philosophers (alternating between thinking and eating, circled around a table), 5 (n) chopsticks (one between each philosopher)

// 'BROKEN' SEMAPHORE SOLUTION //
// it is 'broken' because ...
semaphore chopstick[5]; // global
do
{
wait(&chopstick[i]);
wait(&chopstick[(i+1) % 5]);
// critical section (EATING HERE) //
signal(&chopstick[i]);
signal(&chopstick[(i+1) % 5]);
// thinking
} while(true);
// 'BROKEN' SEMAPHORE SOLUTION //
// MONITOR SOLUTION //
typedef enum State {thinking, eating, hungry} State;
monitor dining
{
// shared data
State state[5]; // current state
bool self[5]; // conditions
}
// i/k: 0...4
function pickupi()
{
state[i] = hungry;
test(i);
if(state[i] != eating) { self[i].wait(); }
}
function putdowni()
{
state[i] = thinking;
test((i + 4) % 5);
test((i + 1) % 5);
}
function testk()
{
if(state[(k + 4) % 5] != eating && state[(k + 1) % 5] != eating)
{ state[k] = eating; self[k].signal(); }
}
init_code()
{ for(i = 0; i < 5; i++) { state[i] = thinking; self[i] = false; } }
// MONITOR SOLUTION //
// MONITOR (WITH SEMAPHORE) SOLUTION //
// init global vars to monitor
semaphore mutex = 1; // exclusive access to monitor
semaphore next = 0; // signal processes wait
int next_count = 0; // how many signal-ers
// #define i: 0...4
function Pi() // i: 0...4
{
wait(&mutex);
// body of procedure Pi
if(next_count > 0) { signal(&next); }
else { signal(&mutex); }
}
// #define k: 0...4
semaphore k_sem = 0; int k_count = 0;
k.Wait()
{
wait(&mutex);
k_count++;
if(k_count > 0) { signal(&next); } else { signal(&mutex); }
wait(&k_sem);
k_count--;
}
k.Signal()
{
if(k_count > 0) { next_count++; signal(k_sem); wait(&next); next_count--; }
}
// MONITOR (WITH SEMAPHORE) SOLUTION //
Deadlock: 2+ processes involved in a cyclic wait situation, each mutually blocked and waiting for a resource from each other
Starvation: 1+ processes are waiting indefinitely for processes
Requirements of deadlock:
- Mutual exclusion: only one process at a time can use a particular 'unit' of a resource
- Hold & Wait: processes acquiring resources holds resources it already has while trying to get more
- No premption: can't take resources away form processes as needed
- Circular wait: P0 holds R1, waiting for R2, P1 holds R2, waiting for R1, &c
Resource Allocation Graphs (RAGs): show which processes are requresing which resources, which resources have been granted, and how many units of each resource are available.
Processes are represented by nodes (circles), resources by rectangles (often containing multiple units (boxes inside)
[def] RAG G := edges E & vertices V s.t.
V := {P (process), R (resource)}, P := {P0, P1, ...}, R := {R0, R1, ...}
E := {(P, R) | P -> (needs) R}, {(R, P) | R -> (allocated to) P}
RAG can be used to detect deadlocks, via detecting graph knots (cycles) := strongly-connected subgraph (of a directed graph) s.t. staring from any node in the subgraph, it is impossible to leave the subgraph by following the edges of the graph.Because, if no cycles / knots exists in the RAG, no deadlock exists (cycle is a necessary, not sufficient condition for deadlock; also, there can be a deadlock without a knot). To handle dealock, there are four strategies:
- Prevention: elininates one of the four necessary conditions of deadlock:
- mutex: can relax for sharable resources, but not for exclusive resources
- hold & wait: don't let process hold resources as it waits to obtain other resources, process must get all necessary resources at once; => leads to potential starvation
- no preemption: allow OS to take away resources from processes which hold resources but are waiting for others, then added to a list of 'victim' processes that need to be restarted
- circular wait: impose ordering on resources, require processes to requrest resources in order, eliminating possibility of circular wait
- Avoidance: examines requests and makes appropriate decisions to prevent the system from deadlocking
- State: # available and allocated resources and max demands of processes
- Safe state: resources can be allocated to each process in some order and no dealock occurs
- Detection: detection alg + deadlock removal mechanism; cycle detection is O(n^2 * m) where n := # processes, m := # resources
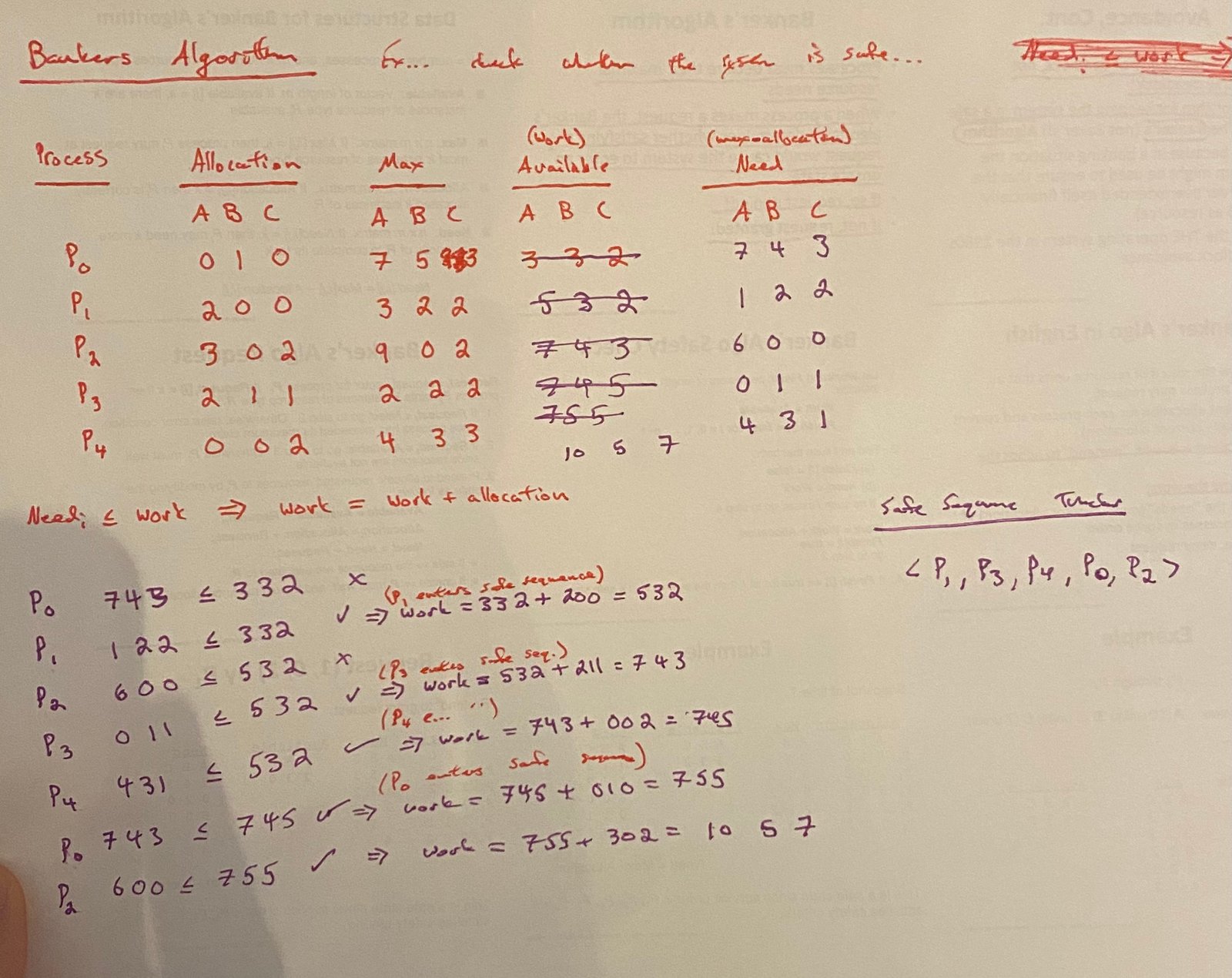
For deadlock avoidance, one solution is Banker's Algorithm, where processes have to declare the maximal resource needs, when the process makes a requrest, the requrest is checked to see if it would make system unsafe - if yes, deny, no grant it.
Memory Management
Content coming soon...
File Systems
Content coming soon...
Scheduling
Content coming soon...